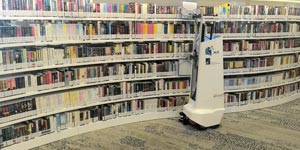
An automatic shelf scanning robot can locate missing or out-of-sequence books, even along curved shelves. © 2016 A*STAR Institute for Infocomm Research
Being able to access and download information in an instant is a hallmark of the digital age. But much of the world’s knowledge remains between the pages of printed books. Tracking these volumes in libraries is a tedious, labor-intensive process, but improved access to these invaluable resources is now possible thanks to robot technology developed at Agency for Science, Technology and Research (A*STAR), Singapore [1].
Some libraries are adapting to automation by placing Radio Frequency Identification (RFID) tags into their collections. These computerized barcodes contain unique identifying labels that can be quickly scanned using wireless, handheld RFID readers. Alternatively, ‘smart shelves’ containing multiple RFID antenna can automatically register when books enter or are removed from their stacks. Such approaches are expensive, however, and still rely on manual labor.
At A*STAR’s Institute for Infocomm Research, researchers Renjun Li, Zhiyong Huang, Ernest Kurniawan, and Chin Keong Ho are designing robots that can relieve librarians of many menial tasks, while enhancing searching and sorting of books. Their latest project is an autonomous robotic shelf scanning (AuRoSS) platform that can self-navigate through libraries at night, scanning RFID tags to produce reports on missing and out-of-sequence books.
Li notes that this function required a way to steer a tall, wheeled robot through complex mazes of library stacks, while keeping a critical distance from shelves at all times. “Too far and we lose the RFID signals, but too close and the antenna hits the shelf,” he says.
The team’s other obstacle was reading available library maps. Although adequate for human users, map resolutions are usually not detailed enough for robot movement. “We decided to detect the shelf surface itself, and use that as a reference to plan the paths,” says Li.
To help track shelves in real-time, the researchers assembled a ‘macro-mini’ manipulator, where the mobile base robot contains an additional small robotic arm. The mini manipulator can move laterally, and uses ultrasonic sensors to position an RFID antenna to the optimal distance for book scanning. It also measures positioning errors, and feeds this data into the mobile navigation unit to anticipate direction changes.
Real-world trials at Singapore libraries revealed the AuRoSS robot’s potential — up to 99 per cent scanning accuracy was achieved, even with curved shelves (see image). “During the re-opening of Pasir Ris Public Library, we put on a public demonstration and received very positive reactions,” says Li. “We are improving the robustness and analytics engine and integrating into library operations.”
The A*STAR-affiliated researchers contributing to this research are from the Institute for Infocomm Research. For more information about the team’s research, please visit the Robot-assisted Scanning and Analytics webpage.
Reference
[1] Li, R., Huang, Z., Kurniawan, E. & Ho, C. K. AuRoSS: an autonomous robotic shelf scanning system. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sept 28 – Oct 2, 2015, Hamburg Germany. pp. 6100–6105.
The I2R team who worked on the autonomous shelf scanning robot: (left to right) Ernest Kurniawan, Chin Keong Ho, Renjun Li, and Zhiyong Huang. © 2016 A*STAR Institute for Infocomm Research