□ A team led by Professor Sung-hoon Lim of the Department of Electrical, Electronic, and Computer Engineering at DGIST (President Kun-woo Lee) announced, on Tuesday 19, the successful development of a deep learning technology that can estimate 3D objects’ location with high accuracy using a monocular camera. 3D object estimation is a key self-driving technology that is expected to offer a cost reduction compared to the existing technology and lighten the weight of vehicles.
□ 3D object estimation is an important technology that enables self-driving vehicles to recognize their surroundings and move safely. It allows self-driving cars to drive safely by accurately identifying pedestrian location, distance, and size, as well as road signs and other vehicles.
□ The existing object estimation method relies on a monocular camera and has the merit of being low cost. However, it is difficult to obtain 3D information via a single image. Moreover, since it is difficult to accurately estimate the distance between the object and the camera, performance is poor.
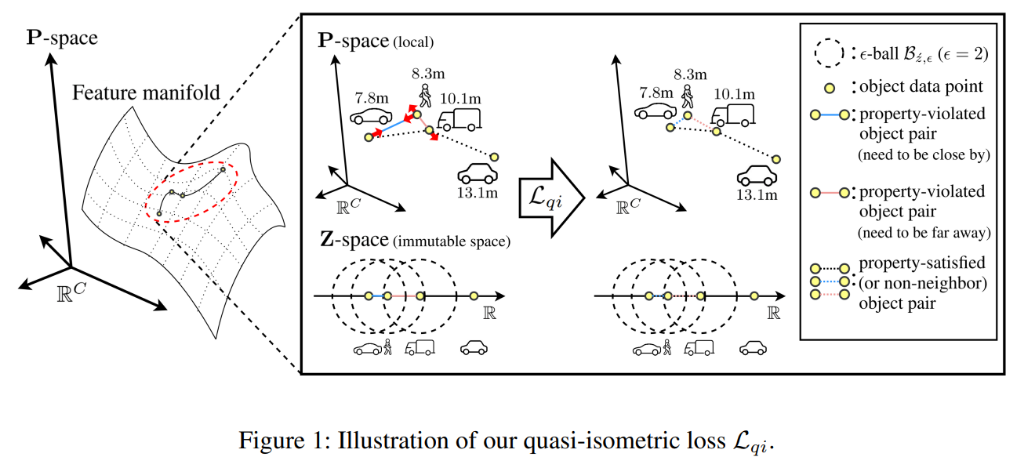
□ To solve this problem, Professor Lim’s team has proposed a new metric learning technique that helps neural networks distinguish object depth. This technique enables easy distinguishment of depth by aligning feature spaces formed by neural networks using individual objects’ depth information.
□ The proposed metric learning technique is applicable to almost all neural networks in existing monocular cameras. Additionally, the team has proposed a new method that can correct errors in specifying objects’ position within the image, effectively improving the performance of depth estimation and overall 3D object estimation.
□ Sung-hoon Lim, a professor in the Department of Electrical, Electronic, and Computer Engineering at DGIST, stated that “The learning technique developed through this study significantly improves performance while maintaining the calculation time of the self-driving visual perception model.” She added that “Further development of this technology is expected to have a positive impact on the development of self-driving technology.”
□ A paper reporting the study’s results has been accepted for publication in Neural Information Processing Systems 2023, and the research was announced via a poster presented at a conference held in the same month.
- Corresponding author e-mail Address : [email protected]