Figure 1. Workflow of the proposed autonomous crack segmentation and exploration system. The UAV captures RGB images, which are processed on Jetson Nano by a segmentation model to generate binary masks. Once cracks are detected, the deep reinforcement learning (DRL) agent is activated to autonomously guide exploration. Raw images are simultaneously stored for offline quantification, while computational efficiency is maintained by avoiding exhaustive raster scanning.
Regular structural health inspections are a critical component of building safety assessment. However, traditional inspection methods remain highly labor-intensive. In recent years, numerous studies have demonstrated the effectiveness of unmanned aerial vehicles (UAVs) in this field, significantly improving inspection efficiency while reducing the risk of exposing personnel to hazardous environments such as bridges, wind turbine towers, and dams.
Despite these advances, UAV-based inspections still rely heavily on human involvement, including manual operation or pre-defined flight path planning. Such dependence inevitably introduces human error and can lead to blind spots in structural coverage, which poses challenges for both UAV control and path planning.
To address these issues, this study, published in Automation in Construction, proposes a fully autonomous crack inspection framework shown in Figure 1. By leveraging deep reinforcement learning, we train an autonomous agent capable of adaptively following crack patterns to maximize inspection efficiency, while also learning to decide the appropriate stopping time to terminate the search in order to mitigate UAV battery usages.

Figure 2. The testing environment used to demonstrate how the crack can be fully explored and captured by the agent navigating itself.
Figure 2 shows an example of surface cracks, and Figure 3 demonstrates that the trained agent is able to explore the existence of cracks and navigate itself without human operation, by using only partially observable states indicated in yellow boxes.
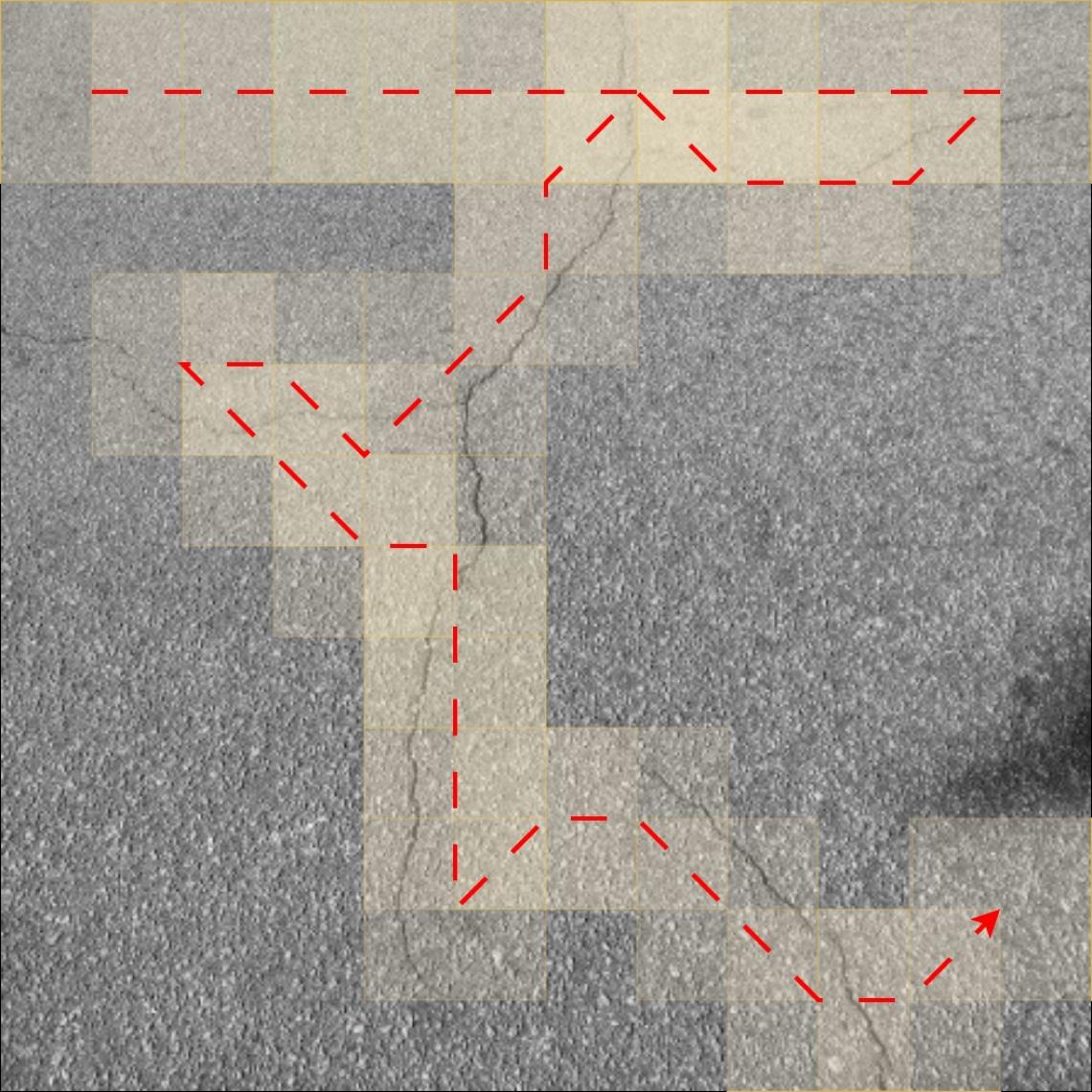
Figure 3. Example of the agent tracking the crack. The red dashed line denotes the trajectory of the agent, while the yellow windows illustrate the local observations perceived by the agent in the environment.
Our proposed approach substantially reduces the time and labor costs associated with structural health monitoring, while enabling more frequent inspections. Ultimately, this contributes to earlier detection of potential structural problems and improved safety and durability of civil infrastructure.
“The proposed framework demonstrates how AI and UAV integration can transform structural health monitoring into a safer, faster, and more reliable process,” says Prof. Rih-Teng Wu, corresponding author of the study.
Prof. Rih-Teng Wu's email address: [email protected]
The lab of Prof. Wu: https://marcelab.caece.net/
Research domains include metamaterial design and discovery, artificial intelligence in civil engineering and resource-efficient learning algorithms.