Navigating Land and Water
Researchers at Tohoku University, Swiss Federal Institute of Technology in Lausanne, University of Ottawa, and Hokkaido University with the support of the Human Frontier Science Program have, for the first time, decoded the flexible motor control mechanism underlying amphibious locomotion, or the ability to walk on land and to swim in water, in centipedes.
Animals move adaptively in various environments by flexibly coordinating their body and limbs. In particular, amphibious animals, such as salamanders and certain fishes, possess outstanding adaptability: they can move between qualitatively different substrates, i.e., land and water, by flexibly changing their body coordination patterns in real time. The essential mechanisms underlying how amphibious animals coordinate their body and appendages during adaptive locomotion have long been elusive.
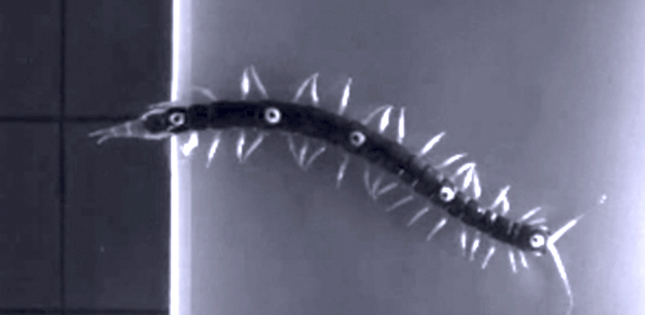
To address this problem, researchers led by Professor Akio Ishiguro of the Research Institute of Electrical Communication at Tohoku University, focused on a specie of centipede, named Scolopendra subspinipes mutilans. This centipede walks on land by coordinating its many legs, but when put in water, it folds its legs and swims by bending the body trunk similar to an eel. The homogeneous and segmented body structure of the centipede facilitates the visualization of behavioral changes as it crosses between terrestrial and aquatic environments, making it an excellent animal model.
Researchers observed intact and nerve transected animals transitioning between walking and swimming and hypothesized that interactions between the central nervous system, the peripheral nervous system, the body, and the environment can explain gait transitions. In particular, they hypothesized that walking or swimming signals generated in the brain are sent posteriorly via distributed neural networks belonging to the central nervous system and located along the body; these brain signals, can be overridden by sensory signals felt by the peripheral nervous system of the legs when they touch the ground during walking. The researchers described this multiple-signal mechanism mathematically, and reproduced the behavior of centipedes in different situations through computer simulations.
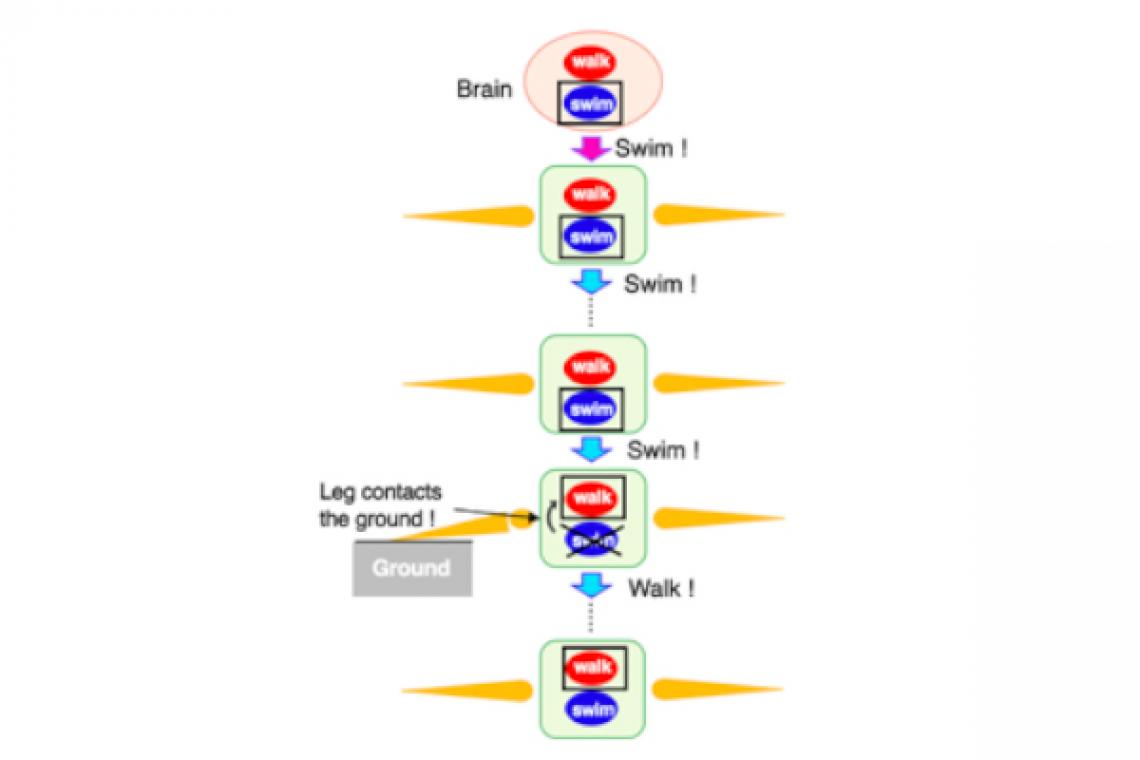
Control mechanism suggested from behavioral experiments. Either "walking" or "swimming" mode can be selected at each part. When a "swimming" signal comes from the brain, it is sent posteriorly, and "swimming" mode is selected at each body part. However, it is overridden by "walking" mode at the point where the leg contacts the ground. Then, "walking" signal is sent hereafter.
The researchers hope that this finding provides insights into the essential mechanism underlying adaptive and versatile locomotion of animals. It will also help develop robots that can move on various environments by flexibly changing body coordination patterns.
Contact:
Akio Ishiguro
Research Institute of Electrical Communication, Tohoku University
Email: ishiguro@riec.tohoku.ac.jp