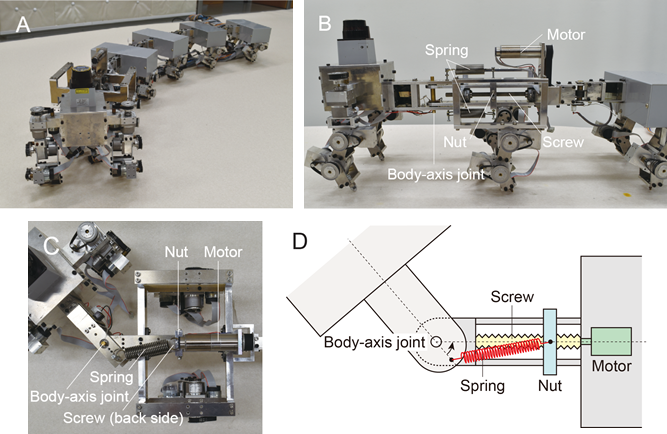
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view)
Researchers at Osaka University develop a new centipede-like robot and show how its motion can be switched from straight and curved walking, which may assist with search and rescue operations or planetary exploration
Osaka, Japan – Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function. In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
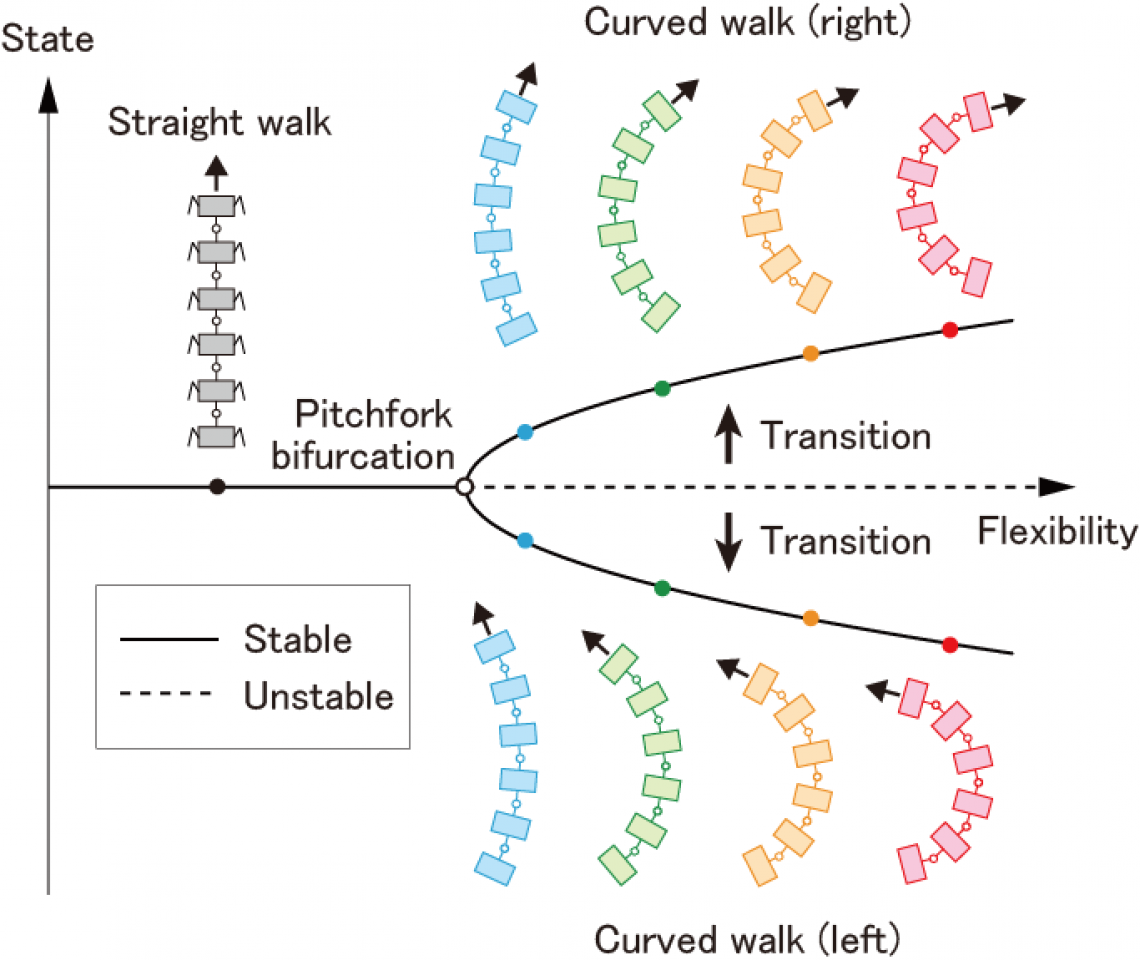
Stable and unstable walking patterns depending on the body-axis flexibility
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Soft Robotics, researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion. The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability. “We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
###
The article, “Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation,” was published in Soft Robotics at DOI: https://doi.org/10.1089/soro.2022.0177