To apply the microrobotic swarms for medical applications in the human body, the generation and navigation behaviours of microrobotic swarms in bio-fluids, such as blood and vitreous humour, need to be investigated. Previously, most of the relevant research was conducted in water, which has very different physical properties from the bio-fluids. In fact, when the fluid media is changed from water to varied bio-fluids, the generation and locomotion of the microrobotic swarms become very different and tricky.
Swarm behaviour of living systems, which stems from the self-organisation among individual elements, is a common feature in nature. Scientists use different agents for understanding the complex guiding principles of swarm behaviours of living systems at multiscale, and roboticists developed various systems that can emulate complex swarm structures in nature through the designing of algorithms and wireless communications. Previously, the same group has reported different microrobotic swarms, i.e., vortex-like (International Journal of Robotics Research, 2018, Vol. 37, 912) and ribbon-like swarms (Nature Communication, 2018, Vol. 9, 3260). These swarms can perform adaptive pattern reconfigurations and navigated locomotion following the applied magnetic fields.
In this work, the group categorised magnetic active swarms into three types, and individually investigated the generation and navigation behaviours of two types of the swarms in bio-fluids. The influences of bio-fluids, such as different viscosities, ionic strengths and mesh-like polymeric structures on microrobotic swarms were studied. A new strategy has been subsequently proposed to select the optimised swarms in different bio-fluids based on their physical properties. The good agreement between the prediction and the experimental results fully validated the strategy. In high-viscosity fluids (such as the vitreous humour inside the eyeball), medium-induced particle swarms are more stable; while in fluids with high ionic strength (such as the gastric acid inside the stomach), magnetic field-induced swarms have better performances. It is also notable that both types of microswarms can be generated in the blood plasma and the whole blood.
Professor Zhang said, “The research on the generation and active delivery of microrobotic swarm in varied biological fluids is indispensable, if we want to open the door of using those tiny robotic agents for medical applications. We are currently collaborating with the colleagues from CU Medicine for exploring the opportunities of using the microrobotic swarm for the minimally invasive treatment in vascular system as well as in the other confined and hard-to-reach regions inside the human body. Meanwhile, my laboratory is also developing the electromagnetic system for autonomous control of the microrobotic swarm at the human scale.”
This work is financially supported by the Research Grants Council (RGC), the HKSAR Innovation and Technology Commission (ITC), and the Research Sustainability of Major RGC Funding Schemes (RSFS) from CUHK. Professor Zhang is currently leading a research group on conducting pioneering work with a focus on the development of medical micro-/nanorobots and their control systems. In the last three years, his lab’s researches on biohybrid helical microrobots, microrobotic swarm, remote sensing of bacterial toxin using mobile microrobots and 3D/4D printing of microrobots have been published in top journals, and also highlighted in Hong Kong RGC YouTube Channel (https://youtu.be/l2NQfgW8tSQ) and Hong Kong ITC website (https://www.itc.gov.hk/enewsletter/180901/en/nanobots_future_surgeons_inside_the_human_body.html).
Note:
Active generation and magnetic actuation of microrobotic swarms in bio-fluids, Nature Communications
https://www.nature.com/articles/s41467-019-13576-6
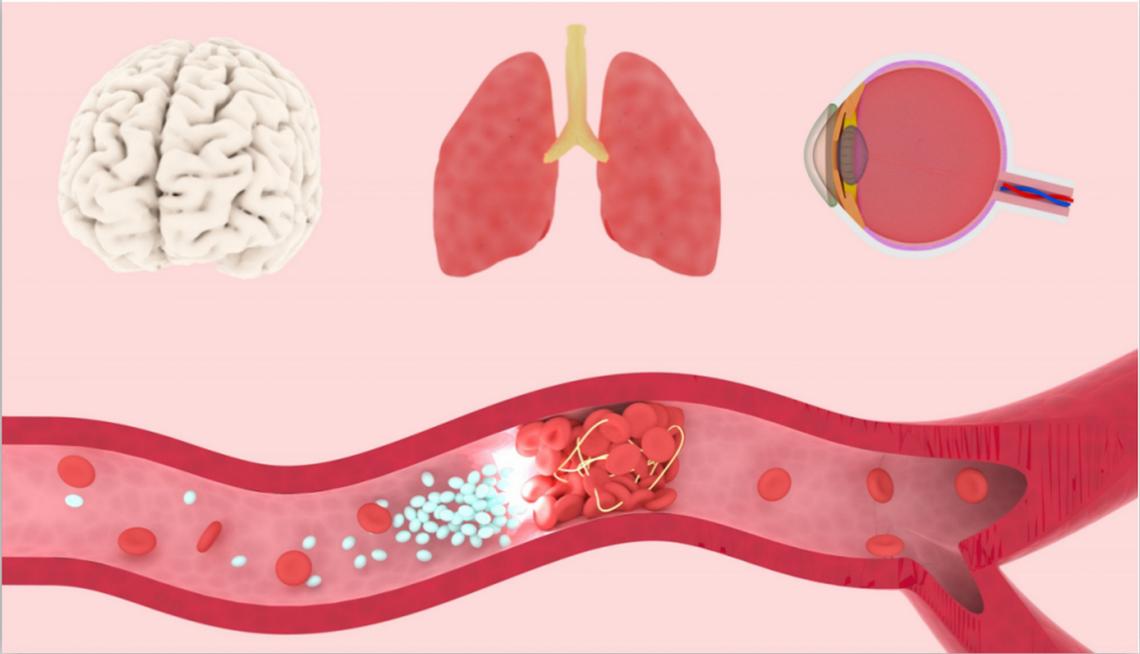
A conceptual illustration of microrobotic swarm for active delivery and localised therapy in vivo. (Credit: Xingzhou Du from Professor Li Zhang’s laboratory)
Professor Li Zhang

A group photo of Professor Zhang’s research team at CUHK campus.