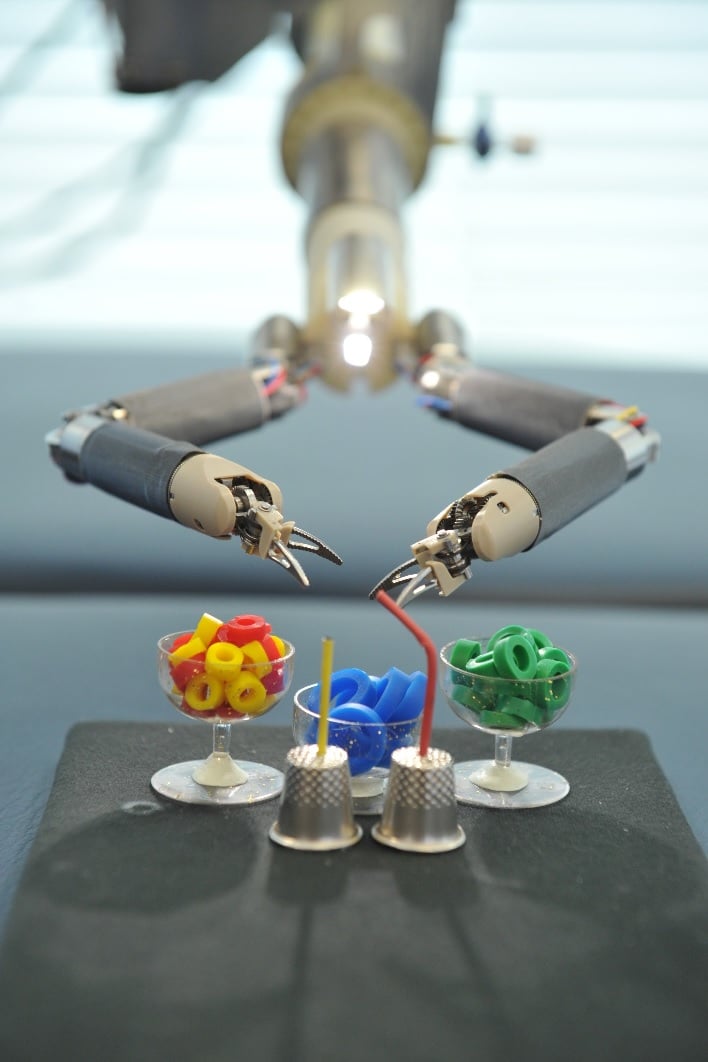
The robotic arms are highly sensitive to touch, have up to ten degrees of movement, and can perform surgical procedures by means of a single incision.
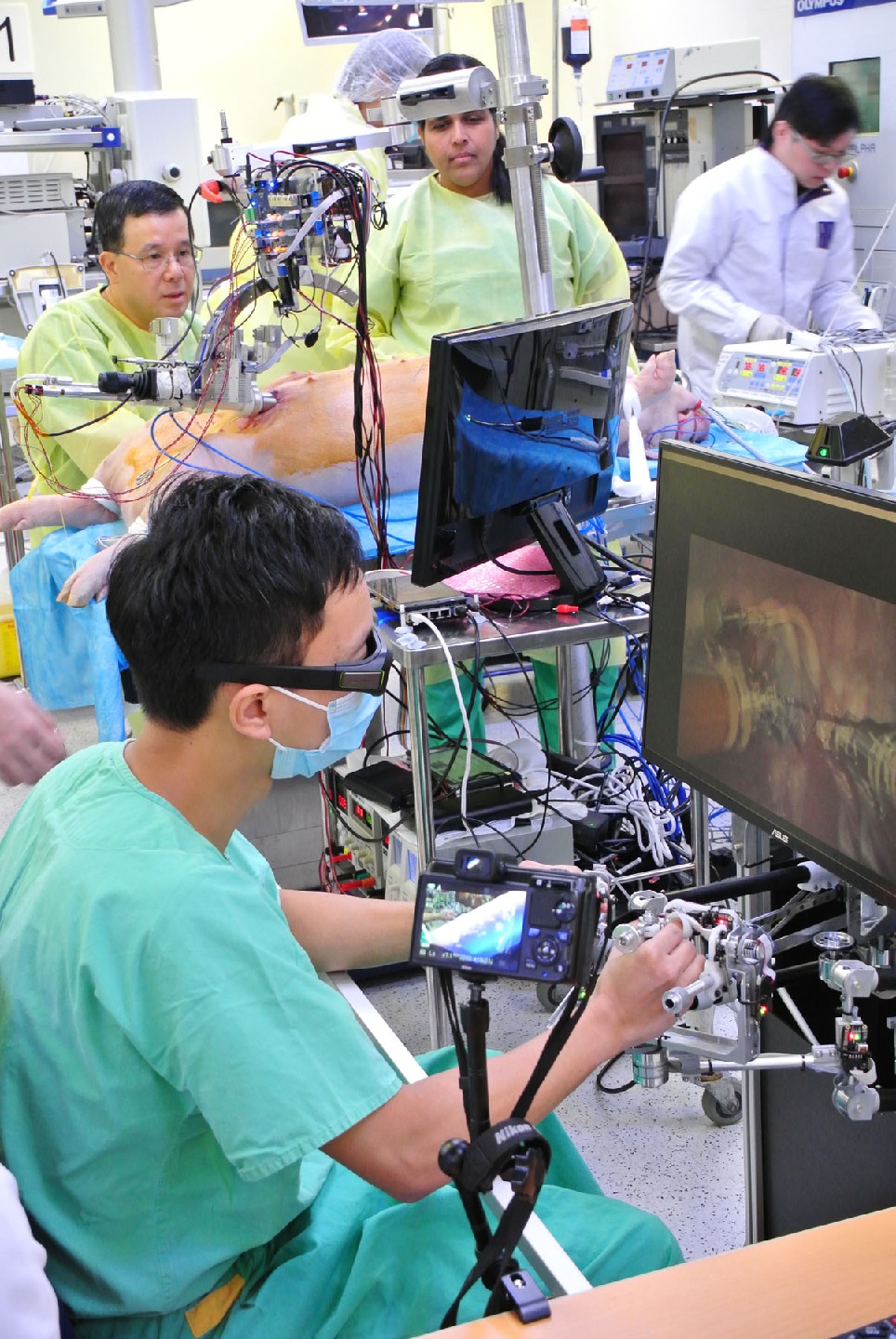
The new system applies the expertise of systems engineer Professor Yung Kai Leung from The Hong Kong Polytechnic University in making precision instruments for outer space, with valuable input on robotic surgery from Professor Yeung Chung Kwong, honorary clinical professor at the University of Hong Kong. They developed a robotic system that has arms driven by internal micromotors and up to ten degrees of freedom in movement. It has been tested in three consecutive animal surgeries: most recently for conducting a one-hour-long gall bladder removal in a live pig.
Currently there is only one dominant surgical robotic system on the market. The system is expensive and has many limitations, including the need for multiple incisions, lack of tactile feedback and bulkiness. Furthermore, it is not designed for natural orifice—or incision-free—robotic surgery. By contrast, the new robotic system can be inserted into a single, small incision or even a natural orifice and expanded inside the human body to perform various surgical operations.
The robotic arms are driven by custommade micromotors adjacent to the end-effectors, allowing them to be operated with high precision and providing good feedback to the surgeon on the amount of force applied.
The team plans to continue to test the new robotic system in animal and cadaver models in more complicated procedures, using a single-incision and natural-orifice approach. Their objective is to apply this system to various robotic surgeries in humans in the near future.
Researchers at The Hong Kong Polytechnic University are experienced in making innovative sophisticated instruments for deep space exploration missions. Their work has led to the production of small-sized, lightweight and high-precision instruments. They are now working on applying these space technologies for civilian purposes. The robotic surgical system is one obvious example of this and they hope it will allow for minimally invasive surgery, enhancing patient well-being.
Further information
Professor Yung Kai Leung | E-mail: [email protected]
Department of Industrial and Systems Engineering
The Hong Kong Polytechnic University

The robotic arms are highly sensitive to touch, have up to ten degrees of movement, and can perform surgical procedures by means of a single incision.
The robotic arms are highly sensitive to touch, have up to ten degrees of movement, and can perform surgical procedures by means of a single incision.