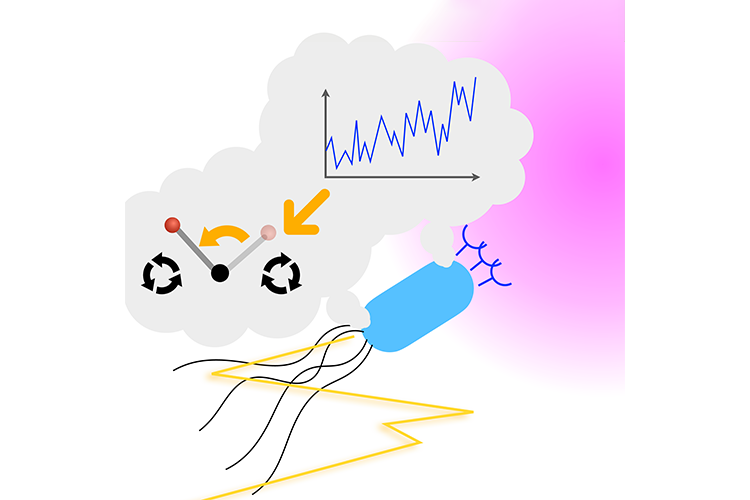
Tokyo, Japan – The aroma of a favorite dessert can tempt almost anyone to follow the scent. By moving in the direction of increasing smell, one can often locate the desired confection. It turns out that even simple organisms, like the single-celled E. coli bacterium, can use a similar method to detect and move toward food. Now, researchers have developed a theoretical model for the best possible search strategy when searching for source of the scent, which may help in the design of new drones or nanobots that can find their own way to a chemical target.
Scientists from the Institute of Industrial Science, The University of Tokyo have studied the odor-searching strategy used by organisms ranging from bacteria to multicellular eukaryotes, which perform “chemotaxis”. Chemotaxis is the process of attraction in the direction of a chemical gradient, and it takes several forms. E. coli bacteria use the common approach called “run-and-tumble,” in which periods of forward swimming are interrupted by rotations that randomly change the direction of motion. Although linear control theory has become part of the established practice of engineering, it does not suffice to handle the nonlinearity and large noise seen in biological systems. A more tailored theory is needed to better understand this phenomenon.
The research team used stochastic optimal control theory to find the best possible fully nonlinear sensing and control strategy of run-and-tumble motion in environments with noisy chemical gradients. They modeled the internal control using a partially observable Markov decision process. In this framework, agents cannot directly observe the correct solution, but they can update their beliefs by sensing their environment.
To make the model as realistic as possible, the researchers included a control cost that represents the physical limitations of regulating when tumbling occurs. “The correspondence between our optimal solution and biochemical bacterial models demonstrates the applicability of our theoretical framework to the understanding of biological search systems,” says first author Kento Nakamura. The primary way that organisms control their motion and progressively move toward a target is by inhibiting tumbling when sensing that the chemical concentration is increasing along their current direction.
This work opens the way for new kinds of autonomous pathfinding algorithms that can be employed to find specific targets, even if their exact locations are unknown. “Understanding the internal control mechanisms of biological organisms would be helpful when designing biomimetic robots that can take advantage of these systems,” says senior author Tetsuya J. Kobayashi.
###
The article, “Optimal sensing and control of run-and-tumble chemotaxis,” was published in Physical Review Research at DOI: 10.1103/PhysRevResearch.4.013120.
About Institute of Industrial Science (IIS), the University of Tokyo
Institute of Industrial Science (IIS), the University of Tokyo is one of the largest university-attached research institutes in Japan.
More than 120 research laboratories, each headed by a faculty member, comprise IIS, with more than 1,200 members including approximately 400 staff and 800 students actively engaged in education and research. Our activities cover almost all the areas of engineering disciplines. Since its foundation in 1949, IIS has worked to bridge the huge gaps that exist between academic disciplines and realworld applications.